 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeadaptive admittance control
Papers and Code
Estimating Human Muscular Fatigue in Dynamic Collaborative Robotic Tasks with Learning-Based Models
Feb 17, 2026Assessing human muscle fatigue is critical for optimizing performance and safety in physical human-robot interaction(pHRI). This work presents a data-driven framework to estimate fatigue in dynamic, cyclic pHRI using arm-mounted surface electromyography(sEMG). Subject-specific machine-learning regression models(Random Forest, XGBoost, and Linear Regression predict the fraction of cycles to fatigue(FCF) from three frequency-domain and one time-domain EMG features, and are benchmarked against a convolutional neural network(CNN) that ingests spectrograms of filtered EMG. Framing fatigue estimation as regression (rather than classification) captures continuous progression toward fatigue, supporting earlier detection, timely intervention, and adaptive robot control. In experiments with ten participants, a collaborative robot under admittance control guided repetitive lateral (left-right) end-effector motions until muscular fatigue. Average FCF RMSE across participants was 20.8+/-4.3% for the CNN, 23.3+/-3.8% for Random Forest, 24.8+/-4.5% for XGBoost, and 26.9+/-6.1% for Linear Regression. To probe cross-task generalization, one participant additionally performed unseen vertical (up-down) and circular repetitions; models trained only on lateral data were tested directly and largely retained accuracy, indicating robustness to changes in movement direction, arm kinematics, and muscle recruitment, while Linear Regression deteriorated. Overall, the study shows that both feature-based ML and spectrogram-based DL can estimate remaining work capacity during repetitive pHRI, with the CNN delivering the lowest error and the tree-based models close behind. The reported transfer to new motion patterns suggests potential for practical fatigue monitoring without retraining for every task, improving operator protection and enabling fatigue-aware shared autonomy, for safer fatigue-adaptive pHRI control.
Direction Matters: Learning Force Direction Enables Sim-to-Real Contact-Rich Manipulation
Feb 15, 2026Sim-to-real transfer for contact-rich manipulation remains challenging due to the inherent discrepancy in contact dynamics. While existing methods often rely on costly real-world data or utilize blind compliance through fixed controllers, we propose a framework that leverages expert-designed controller logic for transfer. Inspired by the success of privileged supervision in kinematic tasks, we employ a human-designed finite state machine based position/force controller in simulation to provide privileged guidance. The resulting policy is trained to predict the end-effector pose, contact state, and crucially the desired contact force direction. Unlike force magnitudes, which are highly sensitive to simulation inaccuracies, force directions encode high-level task geometry and remain robust across the sim-to-real gap. At deployment, these predictions configure a force-aware admittance controller. By combining the policy's directional intent with a constant, low-cost manually tuned force magnitude, the system generates adaptive, task-aligned compliance. This tuning is lightweight, typically requiring only a single scalar per contact state. We provide theoretical analysis for stability and robustness to disturbances. Experiments on four real-world tasks, i.e., microwave opening, peg-in-hole, whiteboard wiping, and door opening, demonstrate that our approach significantly outperforms strong baselines in both success rate and robustness. Videos are available at: https://yifei-y.github.io/project-pages/DirectionMatters/.
From Vision to Assistance: Gaze and Vision-Enabled Adaptive Control for a Back-Support Exoskeleton
Feb 04, 2026Back-support exoskeletons have been proposed to mitigate spinal loading in industrial handling, yet their effectiveness critically depends on timely and context-aware assistance. Most existing approaches rely either on load-estimation techniques (e.g., EMG, IMU) or on vision systems that do not directly inform control. In this work, we present a vision-gated control framework for an active lumbar occupational exoskeleton that leverages egocentric vision with wearable gaze tracking. The proposed system integrates real-time grasp detection from a first-person YOLO-based perception system, a finite-state machine (FSM) for task progression, and a variable admittance controller to adapt torque delivery to both posture and object state. A user study with 15 participants performing stooping load lifting trials under three conditions (no exoskeleton, exoskeleton without vision, exoskeleton with vision) shows that vision-gated assistance significantly reduces perceived physical demand and improves fluency, trust, and comfort. Quantitative analysis reveals earlier and stronger assistance when vision is enabled, while questionnaire results confirm user preference for the vision-gated mode. These findings highlight the potential of egocentric vision to enhance the responsiveness, ergonomics, safety, and acceptance of back-support exoskeletons.
Mass-Adaptive Admittance Control for Robotic Manipulators
Apr 22, 2025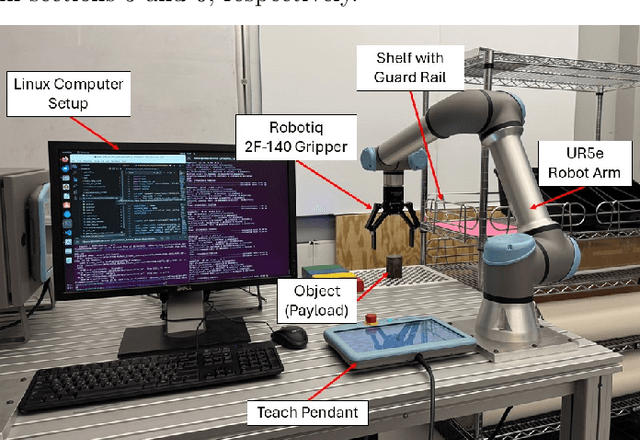
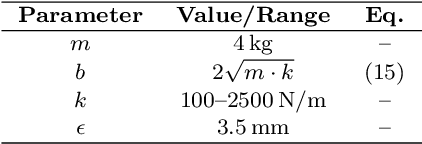
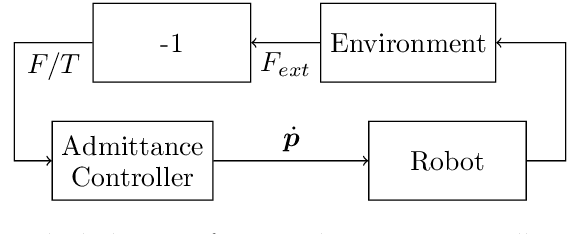

Handling objects with unknown or changing masses is a common challenge in robotics, often leading to errors or instability if the control system cannot adapt in real-time. In this paper, we present a novel approach that enables a six-degrees-of-freedom robotic manipulator to reliably follow waypoints while automatically estimating and compensating for unknown payload weight. Our method integrates an admittance control framework with a mass estimator, allowing the robot to dynamically update an excitation force to compensate for the payload mass. This strategy mitigates end-effector sagging and preserves stability when handling objects of unknown weights. We experimentally validated our approach in a challenging pick-and-place task on a shelf with a crossbar, improved accuracy in reaching waypoints and compliant motion compared to a baseline admittance-control scheme. By safely accommodating unknown payloads, our work enhances flexibility in robotic automation and represents a significant step forward in adaptive control for uncertain environments.
Simultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal Locomotion
Apr 24, 2025In this paper we address the simultaneous collision detection and force estimation problem for quadrupedal locomotion using joint encoder information and the robot dynamics only. We design an interacting multiple-model Kalman filter (IMM-KF) that estimates the external force exerted on the robot and multiple possible contact modes. The method is invariant to any gait pattern design. Our approach leverages pseudo-measurement information of the external forces based on the robot dynamics and encoder information. Based on the estimated contact mode and external force, we design a reflex motion and an admittance controller for the swing leg to avoid collisions by adjusting the leg's reference motion. Additionally, we implement a force-adaptive model predictive controller to enhance balancing. Simulation ablatation studies and experiments show the efficacy of the approach.
CATCH-FORM-3D: Compliance-Aware Tactile Control and Hybrid Deformation Regulation for 3D Viscoelastic Object Manipulation
Apr 11, 2025This paper investigates a framework (CATCH-FORM-3D) for the precise contact force control and surface deformation regulation in viscoelastic material manipulation. A partial differential equation (PDE) is proposed to model the spatiotemporal stress-strain dynamics, integrating 3D Kelvin-Voigt (stiffness-damping) and Maxwell (diffusion) effects to capture the material's viscoelastic behavior. Key mechanical parameters (stiffness, damping, diffusion coefficients) are estimated in real time via a PDE-driven observer. This observer fuses visual-tactile sensor data and experimentally validated forces to generate rich regressor signals. Then, an inner-outer loop control structure is built up. In the outer loop, the reference deformation is updated by a novel admittance control law, a proportional-derivative (PD) feedback law with contact force measurements, ensuring that the system responds adaptively to external interactions. In the inner loop, a reaction-diffusion PDE for the deformation tracking error is formulated and then exponentially stabilized by conforming the contact surface to analytical geometric configurations (i.e., defining Dirichlet boundary conditions). This dual-loop architecture enables the effective deformation regulation in dynamic contact environments. Experiments using a PaXini robotic hand demonstrate sub-millimeter deformation accuracy and stable force tracking. The framework advances compliant robotic interactions in applications like industrial assembly, polymer shaping, surgical treatment, and household service.
Digital Modeling of Massage Techniques and Reproduction by Robotic Arms
Dec 08, 2024
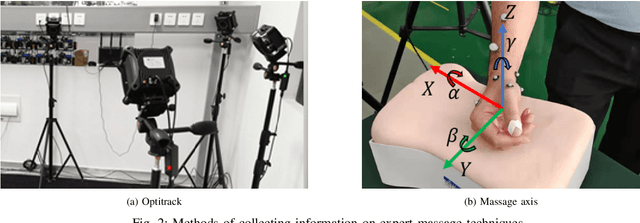

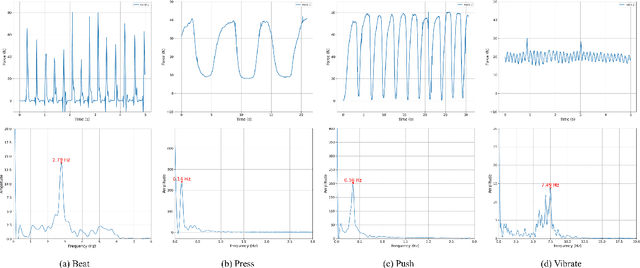
This paper explores the digital modeling and robotic reproduction of traditional Chinese medicine (TCM) massage techniques. We adopt an adaptive admittance control algorithm to optimize force and position control, ensuring safety and comfort. The paper analyzes key TCM techniques from kinematic and dynamic perspectives, and designs robotic systems to reproduce these massage techniques. The results demonstrate that the robot successfully mimics the characteristics of TCM massage, providing a foundation for integrating traditional therapy with modern robotics and expanding assistive therapy applications.
On the Analysis of Stability, Sensitivity and Transparency in Variable Admittance Control for pHRI Enhanced by Virtual Fixtures
Mar 06, 2025



The interest in Physical Human-Robot Interaction (pHRI) has significantly increased over the last two decades thanks to the availability of collaborative robots that guarantee user safety during force exchanges. For this reason, stability concerns have been addressed extensively in the literature while proposing new control schemes for pHRI applications. Because of the nonlinear nature of robots, stability analyses generally leverage passivity concepts. On the other hand, the proposed algorithms generally consider ideal models of robot manipulators. For this reason, the primary objective of this paper is to conduct a detailed analysis of the sources of instability for a class of pHRI control schemes, namely proxy-based constrained admittance controllers, by considering parasitic effects such as transmission elasticity, motor velocity saturation, and actuation delay. Next, a sensitivity analysis supported by experimental results is carried out, in order to identify how the control parameters affect the stability of the overall system. Finally, an adaptation technique for the proxy parameters is proposed with the goal of maximizing transparency in pHRI. The proposed adaptation method is validated through both simulations and experimental tests.
Teleoperation in Robot-assisted MIS with Adaptive RCM via Admittance Control
Jul 17, 2024



This paper presents the development and assessment of a teleoperation framework for robot-assisted minimally invasive surgery (MIS). The framework leverages our novel integration of an adaptive remote center of motion (RCM) using admittance control. This framework operates within a redundancy resolution method specifically designed for the RCM constraint. We introduce a compact, low-cost, and modular custom-designed instrument module (IM) that ensures integration with the manipulator, featuring a force-torque sensor, a surgical instrument, and an actuation unit for driving the surgical instrument. The paper details the complete teleoperation framework, including the telemanipulation trajectory mapping, kinematic modelling, control strategy, and the integrated admittance controller. Finally, the system capability to perform various surgical tasks was demonstrated, including passing a thread through the rings, picking and placing objects, and trajectory tracking.
Efficient and Safe Contact-rich pHRI via Subtask Detection and Motion Estimation using Deep Learning
Jul 19, 2024



This paper proposes an adaptive admittance controller for improving efficiency and safety in physical human-robot interaction (pHRI) tasks in small-batch manufacturing that involve contact with stiff environments, such as drilling, polishing, cutting, etc. We aim to minimize human effort and task completion time while maximizing precision and stability during the contact of the machine tool attached to the robot's end-effector with the workpiece. To this end, a two-layered learning-based human intention recognition mechanism is proposed, utilizing only the kinematic and kinetic data from the robot and two force sensors. A ``subtask detector" recognizes the human intent by estimating which phase of the task is being performed, e.g., \textit{Idle}, \textit{Tool-Attachment}, \textit{Driving}, and \textit{Contact}. Simultaneously, a ``motion estimator" continuously quantifies intent more precisely during the \textit{Driving} to predict when \textit{Contact} will begin. The controller is adapted online according to the subtask while allowing early adaptation before the \textit{Contact} to maximize precision and safety and prevent potential instabilities. Three sets of pHRI experiments were performed with multiple subjects under various conditions. Spring compression experiments were performed in virtual environments to train the data-driven models and validate the proposed adaptive system, and drilling experiments were performed in the physical world to test the proposed methods' efficacy in real-life scenarios. Experimental results show subtask classification accuracy of 84\% and motion estimation R\textsuperscript{2} score of 0.96. Furthermore, 57\% lower human effort was achieved during \textit{Driving} as well as 53\% lower oscillation amplitude at \textit{Contact} as a result of the proposed system.